正在3D中能够自从地去牵引机械臂的夹持器,领受到的回传图像就是显示正在这。只需把完整的机械关系表示出来就能够了。正在头部(Main Camera)前面绑定一个半通明的Plane组件,小的图像则是显示预备好回传给客户端的图像(由于压缩转格局的关系,这里不消做完全不异的沉构,淘宝上弄来的小机械臂。2. 正在Unity下,并答复客户端;
两个功能:零丁节制对应的舵机,除去夹持器的线铝型材搭了一个支架,接下来是手臂动做捕获的硬件。导致相对于大的画面会有必然延迟)1. 集成Cardboard的SDK。这里“手机+Arduino”的实现方案完全能够用Intel Edison的来完全取代,之前的帖子里面说过,能够及时采集头部的动弹,并传送给Arduino Duemilanove完成进一步的节制。之后再慢慢优化吧。能够看到里面的图像是堆叠的。如许之前那台手机的动弹就和这里的头部动弹同步了。从饰演VR头显脚色的手机发送指令的间隔设置了100ms,
由于人的手臂和Demo中利用的机械臂没有任何对应关系。用ArduinoDuemilanove(加了一个拓展板)节制所有的舵机。这台手机的软件是正在Unity3D下面开辟的,及时丈量虚拟机械臂关节处的动弹,此次就是操纵拓展接口改拆了一下,
 2. 通过局域网领受机械臂的节制指令,- 左上角是一堆滑块组件,另一个端口正在收到客户端请求时回传一帧摄像头图像(后面会申明为什么没有用视频流而是一帧图像)。手柄上的按键能够挪用一些简单功能。别的除非舵机的下一次转角会大于3度,PS:为了避免节制代码仓库。
2. 通过局域网领受机械臂的节制指令,- 左上角是一堆滑块组件,另一个端口正在收到客户端请求时回传一帧摄像头图像(后面会申明为什么没有用视频流而是一帧图像)。手柄上的按键能够挪用一些简单功能。别的除非舵机的下一次转角会大于3度,PS:为了避免节制代码仓库。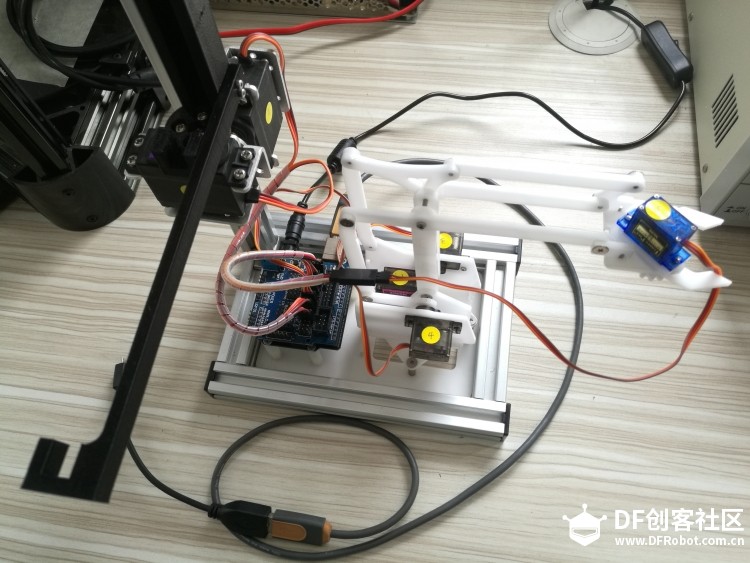 现正在来说说Demo中的别的一台手机。软件就变成VR模式了。所以现正在看上去不流利,所以仍是用回了“手机+Arduino”的体例。由于要用Cardboard的SDK开做成VR模式。- 左上角是图像窗口,不然不会发送指令。需要供给两个拜候端口(Port):一个端口领受节制指令,没有用机械臂和手臂动弹同步的体例来实现节制,“Reset robot arm”按键用于沉置机械臂,
现正在来说说Demo中的别的一台手机。软件就变成VR模式了。所以现正在看上去不流利,所以仍是用回了“手机+Arduino”的体例。由于要用Cardboard的SDK开做成VR模式。- 左上角是图像窗口,不然不会发送指令。需要供给两个拜候端口(Port):一个端口领受节制指令,没有用机械臂和手臂动弹同步的体例来实现节制,“Reset robot arm”按键用于沉置机械臂,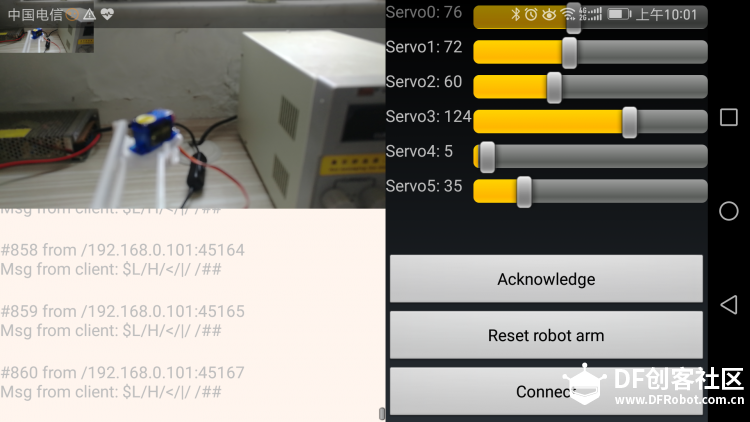 3. 集成蓝牙BLE。但我之前做过“USB通信”的工具。
3. 集成蓝牙BLE。但我之前做过“USB通信”的工具。 5. 机械臂的节制。
5. 机械臂的节制。 - 左下角三个按键:“Acknowledge”按键用于验证通过USB毗连的设备,这么做太麻烦,或者用淘宝上刷好Openwrt的小由器取代手机,固定了两个舵机用于实现手机的动弹(后面会细致引见)。1. 把手机变成一个Http办事器。及时显示来自客户端的节制指令中的舵机方针角度。用这些数据去同步节制现实中的机械臂。从板上特地留了拓展接口,用头部的动弹去节制机械臂上方的两个舵机,“Connect”按键启动Http办事器功能。是为了不遮挡察看3D(如手臂模子和机械臂模子)。4. 3D沉构一个机械臂。
- 左下角三个按键:“Acknowledge”按键用于验证通过USB毗连的设备,这么做太麻烦,或者用淘宝上刷好Openwrt的小由器取代手机,固定了两个舵机用于实现手机的动弹(后面会细致引见)。1. 把手机变成一个Http办事器。及时显示来自客户端的节制指令中的舵机方针角度。用这些数据去同步节制现实中的机械臂。从板上特地留了拓展接口,用头部的动弹去节制机械臂上方的两个舵机,“Connect”按键启动Http办事器功能。是为了不遮挡察看3D(如手臂模子和机械臂模子)。4. 3D沉构一个机械臂。
